Manejo de motores con Mendieta
Hola! Buen año 2015 para todos!!
En este post les voy a contar detalladamente como hace Mendieta para controlar motores de corriente continua.
A diferencia de otras placas de robótica, a Mendieta no se le necesita agregar un Shield de motores, ya que tal funcionalidad está incluída en su electrónica básica.
Para este fin, se implementó lo que se conoce en electrónica como «puente H»: circuito electrónico que permite a un motor DC girar en ambos sentidos, o frenar bruscamente, permitiendo rápidamente movimientos de avance y retroceso.
El término «puente H» proviene de la representación gráfica usual del circuito, como se puede apreciar en la siguiente imagen:
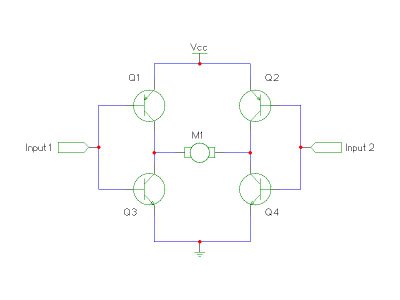
En este caso Q1, Q2, Q3 y Q4 son transistores, que al activarlos alternadamente desde «Input1» e «Input2» permite que la corriente circule por la «mitad» del circuito correspondiente, logrando el sentido de giro deseado.
Los puentes H se pueden fabricar con transistores como se muestra en la figura anterior, pero también con integrados que que tienen esta electrónica en su interior, como el caso de los integrados L293B y L293D. Estos últimos difieren solo en que el primero no posee diodos de protección y el segundo sí. Por este motivo, al crear Mendieta decidimos utilizar el L293D, que tiene dos puentes H y proporciona 600mA al motor, soportando un voltaje de entrada de entre 4,5V y 36V, que es independiente del resto de la electrónica. (pueden descargarse el datasheet aquí)
El conexionado del L293D a dos motores, para un control bidireccional es el siguiente:

Mediante los pines 2 y 7 de controla el sentido de giro del motor M1 y con los pines 10 y 15 el motor M2. Los pines 1 y 9 activan o desactivan cada puente H de manera independiente.
Aunque Mendieta ya lo tiene incorporado, pueden utilizar un circuito como el descripto para manejar motores desde cualquier otra placa, en lugar de adquirir un Shield de motores que resultan mucho mas caros. En tal caso, tienen que considerar que debe unirse el terminal negativo de la alimentación de los motores al GND de la placa controladora.
Finalmente, les muestro en la siguiente tabla la manera de controlar un puente H (uno de los lados del L293D):

Hasta el próximo post! Saludos,
Gabriel
Robotics as a way of getting students closer to mathematical thinking
Today I’d like to share with you a fragment of «A Mathematician’s Lament», by Paul Lockhart.
So how do we teach our students to do mathematics? By choosing engaging and natural problems suitable to their tastes, personalities, and level of experience. By giving them time to make discoveries and formulate conjectures. By helping them to refine their arguments and creating an atmosphere of healthy and vibrant mathematical criticism. By being flexible and open to sudden changes in direction to which their curiosity may lead. In short, by having an honest intellectual relationship with our students and our subject.
I think this post’s title and the cited fragment speak by themselves.
You can read the full piece here.
De modo que ¿cómo deberíamos enseñar matemáticas a nuestros estudiantes? Escogiendo problemas naturales e interesantes, que vayan con sus gustos, personalidades y nivel de experiencia. Dándoles tiempo para hacer descubrimientos y formular conjeturas. Ayudándoles a refinar sus argumentos y creando una atmósfera de crítica matemática sana y saludable. Siendo flexibles y abiertos a cambios súbitos en la dirección a la que apunte su curiosidad. En resumen, manteniendo una relación intelectual honesta con nuestros estudiantes y las matemáticas.
Creo que el título de este post, en conjunto con el fragmento citado, hablan por sí solos.
Pueden leer la pieza entera acá
.
Leap Motion .pem release!
Por Sebas - Physical Etoys - 4/Dic/2014
It is a reality that, much more than before, we are immersed in the era of interaction and new generations demand efficient feedback. Kids come to our world as scientists because they adopt easily the culture of “what if I do X?”. They want to know, they want to experiment to see what happens, they repeat procedures whose results grab their attention, especially the ones that makes them laugh. And by doing these actions, they begin to create their own ideas about the world that surrounds them with the help of their hands. During kindergarten, kids build their representations of the world with putty, adapt designs, throw things and destroy them if they find it necessary.
At some point, this changes. Kids learn to read and receive books which are fantastic because they teach us useful knowledge and keep the class organized. Both teachers and students know what to do and have a normalized flow of homework in order to foster abstract thinking over years. However, experimental approaches to gain knowledge from kinesthetic ways begin to decrease.
I always liked the idea of giving importance to kinesthetic learning as a complement. It’s very hard to find someone who has forgotten biking, or who writes without looking at the keyboard, plays the piano or hits a tennis ball without looking a racket. All of These examples have at least one thing in common that books do not have: instant feedback during interaction. Computers are perfect tools for obtaining instant feedback during creational processes. However, the reality shows that we are still conditioned by outdated paradigms and we put ourselves as consumers and our way of learning with them seems more like receiving knowledge during a short attention span instead of using it (except for videogames).
I think that educational robotics is something that combines science with kinesthetic development, experimentation and interaction with real-world feedback. Moreover, kids are very keen on robots. Man-machine interfaces have evolved and Leap Motion sensor is an example. It provides an untraditional way to interact with the computer using your hands and it goes in line with our vision of learning. Furthermore, it gives us an abstract representation of hands’ data which we consider very useful to have it in our platform. This will provide another way to interact with different robotic kits enriching the expression within the programming environment open-source Physical Etoys.
We invite you to download our LeapMotion.pem for Physical Etoys (Windows 7 or later) here.
Thank you, Leap Inc. for giving us such a wonderful device 🙂
Mucho más que antes, nos encontramos inmersos en la era de la interacción y las nuevas generaciones demandan feedback eficiente. Los nenes vienen a nuestro mundo como científicos porque adoptan fácilmente la cultura del “Qué pasaría si hago X?”. Ellos quieren saber, quieren experimentar para ver qué pasa, repiten procedimientos cuyos resultados les llama la atención, especialmente los que los hacen reír. Y con estas acciones ellos comienzan a crear sus propias ideas acerca del mundo que los rodea con la ayuda de sus manos. Durante el jardín de infantes, los niños realizan sus propias representaciones del mundo con plastilina, adaptan los diseños, tiran cosas y las destruyen si lo creen necesario.
En algún punto, esto cambia. Los nenes aprenden a leer y reciben libros, que son fantásticos porque nos enseñan conocimiento útil y mantienen la clase organizada. Tanto maestros como estudiantes saben lo que tienen que hacer y se les asigna un flujo normalizado de tareas para el hogar para incentivar el pensamiento abstracto a medida que pasan los años. Sin embargo, las aproximaciones empíricas para obtener conocimiento en forma kinestésica se decrementan.
Yo creo que la robótica educativa es algo que combina ciencia con el desarrollo kinestésico, experimentación e interacción con feedback del mundo real. Además, los niños, manifiestan mucho interés por los robots. Las interfaces hombre/máquina evolucionaron y el sensor Leap Motion es prueba de ello. Provee una forma no tradicional de interactuar con las computadoras usando las manos y va en consonancia con nuestra visión del aprendizaje. Aparte, nos da una representación abstracta de los datos de las manos que nos parece de suma importancia para agregarlo a nuestra plataforma. Esto proveerá otra forma de interacción con kits de robótica, enriqueciendo la expresividad dentro del ambiente de programación open-source Physical Etoys.
Los invitamos a bajarse nuestro LeapMotion.pem para Physical Etoys (Windows 7 en adelante) here.
Muchas gracias Leap Inc. por darnos un dispositivo maravilloso.

SLAM: Preparando el ER1
Hola a todos!
Anteriormente «Tera» les había contado sobre el proyecto de su tesis doctoral, que tratará sobre SLAM (Leer aquí).
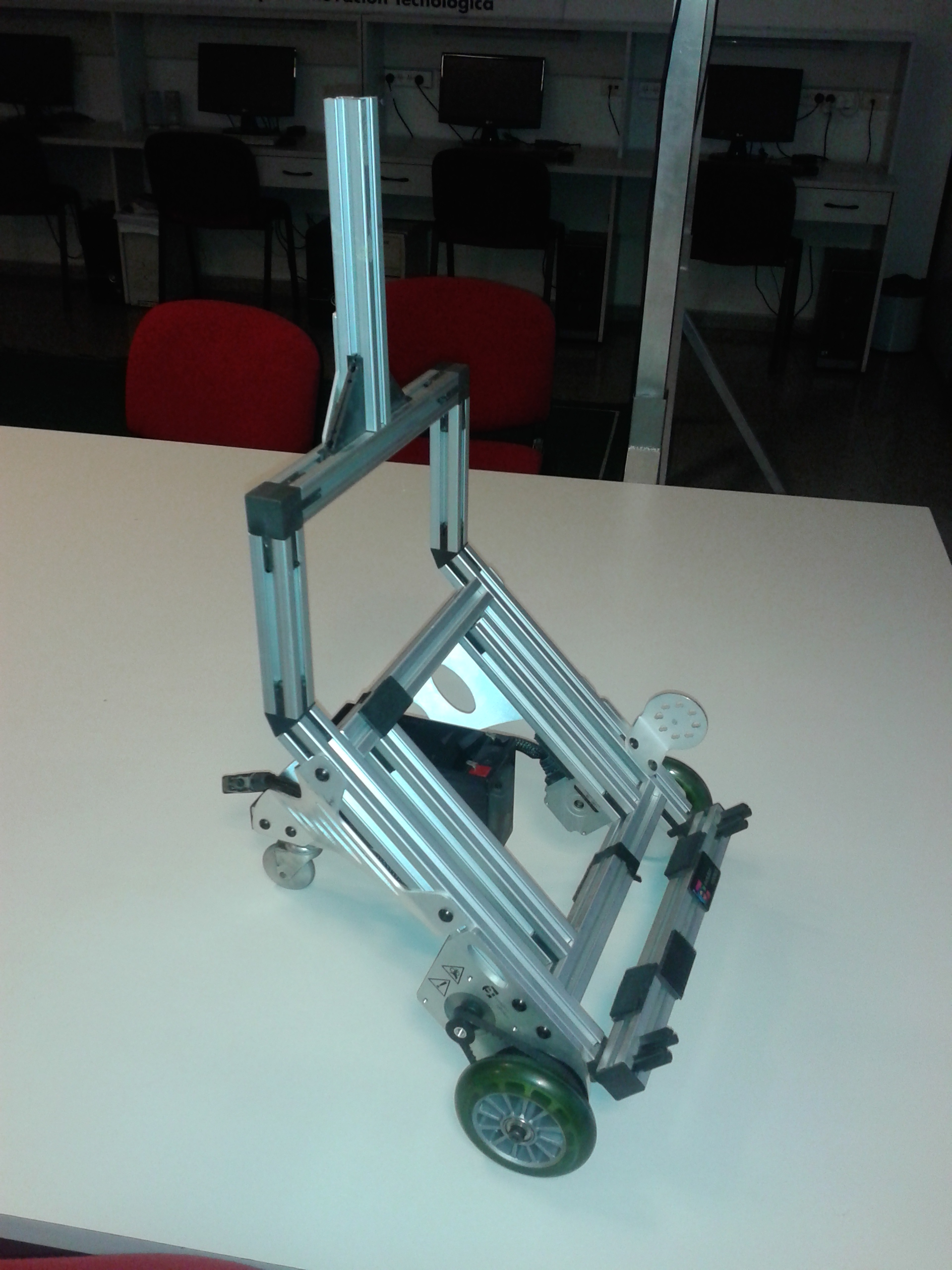
Pensando en ello, estamos preparando lo que va a ser el robot base del proyecto: el ER1 (que alguna vez nos donó Microsoft). El mismo estaba sin uso hace un largo tiempo porque se había roto la placa controladora, así que tuvimos que diseñar una nueva.
Por lo tanto solo usaremos el chasis y los motores del robot original.
El manejo de los motores no fue fácil, ya que son unos paso a paso que funcionan a solo 2,4V, pero con un consumo alto de 2,8A, lo que producía demasiada temperatura para los controladores de motores que solíamos utilizar, y se ponían tan calientes que no había disipador/cooler que lo enfriara debidamente.
En consecuencia, tuvimos que implementar un regulador de voltaje que maneja mayor corriente que un simple LM7805; se trata del LM338 que soporta hasta 5A de consumo.
El control de los motores lo haremos con una placa Arduino Uno (aunque tal vez mas adelante la reemplacemos por nuestra propia «Mendieta«)
En la parte superior del chasis del ER1 fijaremos el Kinect, para lo cual hemos diseñado en SketchUp e impreso en nuestra impresora 3D, la pieza adaptadora, la que podrán observar en las siguientes entradas del tema.
Con estos avances apuntamos a cumplir la primera parte del proyecto, que tiene como objetivo específico: «Desarrollar la estructura, mecánica, electrónica y suministro de energía de un robot que transporte una notebook, un sensor de profundidad por infrarrojo y una cámara (kinect).»
Muy pronto les seguiremos contando los avances del proyecto, así que estén atentos.
Saludos,
Gabriel
BlobTracker
Por Nikita - Physical Etoys - 30/Oct/2014

BlobTracking es una extensión de Physical Etoys que te permite seleccionar un punto en un Morph (una imagen o un frame) y seguir el color seleccionado de ese objeto, mientras no cambie la luminosidad mas de lo que permita el threshold del DLL.
Se puede realizar tracking a los movimientos de ese objeto en pantalla. De esta manera se podrá dibujar cosas en pantalla siguiendo los movimientos de un objeto al que le estés haciendo tracking. Como también puedes buscar un patrón dentro de un ROI y hacer que hagas tracking a ese objeto de formas que hayas implementado.
Es una utilidad que permitirá programar los robots como objetos vivos que puedan seguir ciertos patrones visibles en pantalla y hacer mover al robot con el tamaño y posición del objeto detectado.
Análisis de imágenes en Etoys – Parte 2
Por Tera - Physical Etoys - 30/Oct/2014
En la primer parte de esta serie mostramos las herramientas básicas que nos provee Etoys para poder realizar Análisis de imágenes.
Utilizando estos mosaicos que buscan colores podemos construir algunos proyectos sumamente interesantes como el calculo de una integral desde una aproximación gráfica.

![]()
Programmable Minecraft: coding at runtime
Hello everyone! The Programmable Minecraft project is progressively growing and I’d like to share its current status with you today.
We polished the interaction mechanisms we had designed earlier, so we could begin to «expose» the code involved. Users can now carry out a few basic tasks (such as placing a block of a specific kind on a determinate position of the world). While only a very reduced number of interactions have been incorporated into the project until now, the number of applications these have is huge.
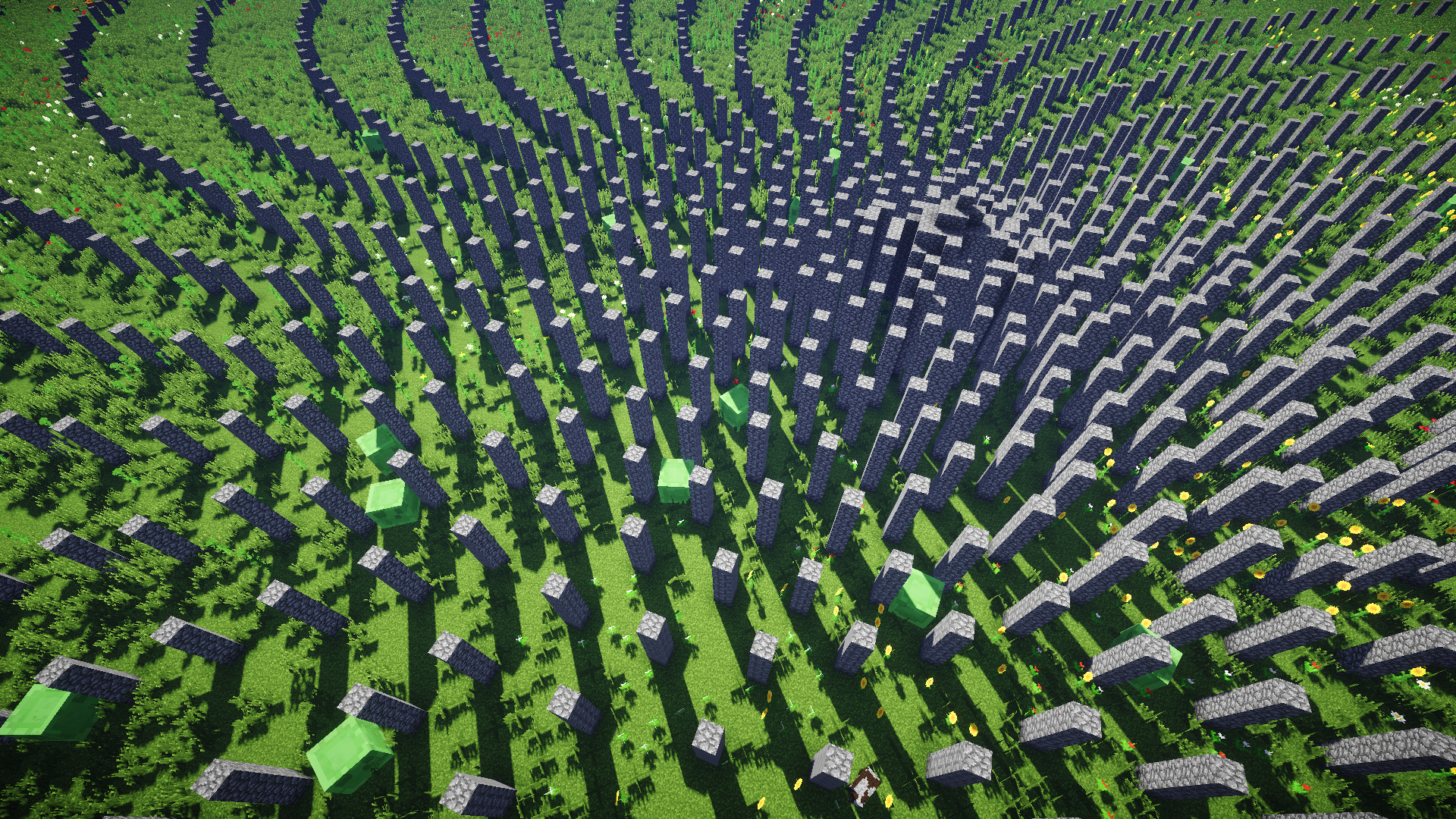
An example of application is the generation of structures of enourmous size and complexity. What would manually take days (or even weeks) can be achieved through simple algorithms in a few minutes.
Here are a few screenshots of some structures we’ve been generating to test the project:


¡Hola a todos! El proyecto de Minecraft Programable avanza poco a poco, y vengo a compartirles su estado actual:
Puliendo un poco los mecanismos de interacción desarrollados inicialmente, comenzamos a «exponer» el código útil para dicha interacción. Ahora es posible para los usuarios realizar algunas acciones básicas mediante código (como colocar un bloque en una determinada posición del mundo). Si bien se ha incorporado un número muy pequeño de interacciones, los resultados alcanzables mediante ellas son prácticamente ilimitados.
Aquí hay algunos screenshots de las estructuras que hemos generado para probar al proyecto:
Congreso + Decálogo para utilizar y disfrutar Etoys
Por Sebas - Mendieta, Minecraft, Physical Etoys - 9/Oct/2014
¡Hola, amigos!
Espero que anden bien. Voy a dividir el post en dos:
La primer parte se trata de nuestra participación en el congreso de tecnología informática organizado por la UAI (CIITI 2014).
El congreso estuvo muy interesante y mostramos nuestros desarrollos en un stand. Además, Gonzalo y Richi dieron dos charlas tituladas Plataforma de Hardware para Robótica Educativa y Plataforma de Programación Physical Etoys dentro del marco de los bloques Robótica Aplicada y Arquitecturas y Desarrollos Tecnológicos Innovadores.
Acá pueden hacer click para agrandar algunos comentarios que nos hicieron por Twitter:

Además, publicamos los pósters que hicimos para el congreso. Si quieren tener una idea bien concreta arcerca de lo que estamos trabajando y qué pretendemos con nuestro trabajo, les recomiendo que los vean:



La segunda parte de este post se trata de un documento que armé antes de dar un taller de Etoys hace un tiempo. El mismo se llama decálogo para utilizar y disfrutar Etoys. El mismo está basado en algunas ideas de Alan Kay y en mi experiencia al usar Etoys.
1-La computadora es un instrumento musical cuya música son las ideas. La música no está en el instrumento sino en los docentes y en los alumnos.
2-Si quiero transmitir una idea, tengo que pensar en qué objetos intervienen y cómo colaboran para lograr ese objetivo.
3-La esencia de Etoys es la interacción. Si no hubiera interacción ¿Qué lo diferenciaría de un libro o de unas diapositivas?
4-La metáfora de un mundo vivo que late constantemente en donde el error es algo natural dentro de la programación es poderosísima para programar nuestros objetos.
5-Exploren, construyan y rompan todo si es necesario para aprender. Etoys está para eso.
6-Etoys es transversal a la currícula. No tienen por qué casarse con matemática, física o tecnología. Existen proyectos de música, pintura, literatura y animación.
7-No es lo mismo consultar un valor que asignarlo. Por lo tanto, hay que considerar desde dónde arrastramos a los bloques.
8-Realizar tutoriales, compartir proyectos y sugerir mejoras hace que la experiencia de Etoys sea mejor no sólo en tu escuela sino en todo el mundo. Nada más lindo que enseñarle a un chico a hacer proyectos para que otros chicos puedan aprender una idea.
9-Utilizar bien Etoys requiere constancia pero por sobre todo humildad. Nosotros guiamos a los chicos pero ellos pueden mostrarnos muchas cosas que descubrieron en sus casas. Más se les enseña, más nos enseñan.
10- Diviértanse. Si no es divertido para ustedes ¿Por qué habría de serlo para los chicos?
Bueno, espero que les sirva esto como guía y que les haya gustado.
Les voy a decir una cosa más: Physical Etoys está más vivo que nunca. Y cierro el post con un video emocionante que nos llegó de la provincia de Salta 😀
Que se diviertan!
Drawing Bézier curves with Etoys
Por Richi - Physical Etoys - 6/Oct/2014
Last saturday, Matías showed me a project he did in Etoys to demonstrate how to draw Bézier curves, and I thought it was too cool not to post it 🙂
So here it is: http://tecnodacta.com.ar/gira/Bezier.006.pr
Enjoy!
El sábado pasado, Matías me mostró este proyecto que hizo en Etoys para entender cómo se dibujan las curvas de Bézier y me pareció que era demasiado interesante como para no publicarlo 🙂
Así que aquí está: http://tecnodacta.com.ar/gira/Bezier.006.pr
¡Que lo disfruten!

¿Por qué usar robots en la escuela?
Podríamos comenzar hablando del futuro, de las nuevas tecnologías. Podríamos mostrar cientos de artículos periodísticos y de investigación que vaticinan que los próximos 50 años van a estar signados por la tecnología física, por los procesos automatizados juntos con la inteligencia artificial. Pero no es esa nuestra motivación más importante. Nosotros amamos la robótica en la escuela como un recurso didáctico que combina lo mejor de dos mundos: una tecnología que está en el imaginario de los chicos y que los fascina y motiva como ninguna otra; y la posibilidad de volver a experimentar con lo físico, como nosotros, los mayores de 40, lo hemos hecho con nuestros juguetes. Con este material los chicos comparten, discuten, argumentan, aprenden a definir y cumplir reglas, experimentan, realizan hipótesis, las comprueban o la descartan, se equivocan, reintentan, fracasan, llegan a buen puerto, se respetan. Y con el maravilloso condimento de que los docentes no saben del tema. Con lo cual, su rol es mucho más rico que el de un mero transmisor de conocimientos. En el aula taller de robótica el docente es responsable de que los alumnos aprendan, que sepan comunicarse, que hagan un buen trabajo en equipo, que sepan explicar lo que hacen y por qué lo hacen, que se respeten en sus roles. Es el que indaga, da cauce a la energía creadora de sus alumnos, propone nuevos desafíos, acompaña desde aquello que ningún libro ni internet puede dar: la mirada pedagógica. Y para eso no hace falta saber de robótica. Eso está en los sitios especializados, en el material didáctico. El docente le da un condimento único e irremplazable, de la misma manera que el trabajo del chico en el aula no es reemplazable por el trabajo en su casa.
Podríamos seguir con muchas palabras más, pero tal vez estas imágenes dicen mucho más:


