Archivo categoría Mendieta
Manejo de motores con Mendieta
Hola! Buen año 2015 para todos!!
En este post les voy a contar detalladamente como hace Mendieta para controlar motores de corriente continua.
A diferencia de otras placas de robótica, a Mendieta no se le necesita agregar un Shield de motores, ya que tal funcionalidad está incluída en su electrónica básica.
Para este fin, se implementó lo que se conoce en electrónica como «puente H»: circuito electrónico que permite a un motor DC girar en ambos sentidos, o frenar bruscamente, permitiendo rápidamente movimientos de avance y retroceso.
El término «puente H» proviene de la representación gráfica usual del circuito, como se puede apreciar en la siguiente imagen:
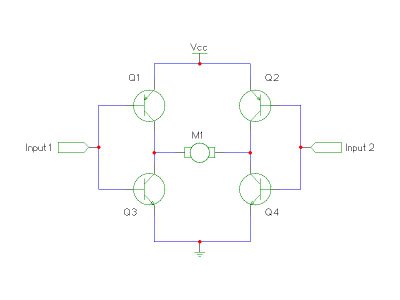
En este caso Q1, Q2, Q3 y Q4 son transistores, que al activarlos alternadamente desde «Input1» e «Input2» permite que la corriente circule por la «mitad» del circuito correspondiente, logrando el sentido de giro deseado.
Los puentes H se pueden fabricar con transistores como se muestra en la figura anterior, pero también con integrados que que tienen esta electrónica en su interior, como el caso de los integrados L293B y L293D. Estos últimos difieren solo en que el primero no posee diodos de protección y el segundo sí. Por este motivo, al crear Mendieta decidimos utilizar el L293D, que tiene dos puentes H y proporciona 600mA al motor, soportando un voltaje de entrada de entre 4,5V y 36V, que es independiente del resto de la electrónica. (pueden descargarse el datasheet aquí)
El conexionado del L293D a dos motores, para un control bidireccional es el siguiente:

Mediante los pines 2 y 7 de controla el sentido de giro del motor M1 y con los pines 10 y 15 el motor M2. Los pines 1 y 9 activan o desactivan cada puente H de manera independiente.
Aunque Mendieta ya lo tiene incorporado, pueden utilizar un circuito como el descripto para manejar motores desde cualquier otra placa, en lugar de adquirir un Shield de motores que resultan mucho mas caros. En tal caso, tienen que considerar que debe unirse el terminal negativo de la alimentación de los motores al GND de la placa controladora.
Finalmente, les muestro en la siguiente tabla la manera de controlar un puente H (uno de los lados del L293D):

Hasta el próximo post! Saludos,
Gabriel
Congreso + Decálogo para utilizar y disfrutar Etoys
Por Sebas - Mendieta, Minecraft, Physical Etoys - 9/Oct/2014
¡Hola, amigos!
Espero que anden bien. Voy a dividir el post en dos:
La primer parte se trata de nuestra participación en el congreso de tecnología informática organizado por la UAI (CIITI 2014).
El congreso estuvo muy interesante y mostramos nuestros desarrollos en un stand. Además, Gonzalo y Richi dieron dos charlas tituladas Plataforma de Hardware para Robótica Educativa y Plataforma de Programación Physical Etoys dentro del marco de los bloques Robótica Aplicada y Arquitecturas y Desarrollos Tecnológicos Innovadores.
Acá pueden hacer click para agrandar algunos comentarios que nos hicieron por Twitter:

Además, publicamos los pósters que hicimos para el congreso. Si quieren tener una idea bien concreta arcerca de lo que estamos trabajando y qué pretendemos con nuestro trabajo, les recomiendo que los vean:



La segunda parte de este post se trata de un documento que armé antes de dar un taller de Etoys hace un tiempo. El mismo se llama decálogo para utilizar y disfrutar Etoys. El mismo está basado en algunas ideas de Alan Kay y en mi experiencia al usar Etoys.
1-La computadora es un instrumento musical cuya música son las ideas. La música no está en el instrumento sino en los docentes y en los alumnos.
2-Si quiero transmitir una idea, tengo que pensar en qué objetos intervienen y cómo colaboran para lograr ese objetivo.
3-La esencia de Etoys es la interacción. Si no hubiera interacción ¿Qué lo diferenciaría de un libro o de unas diapositivas?
4-La metáfora de un mundo vivo que late constantemente en donde el error es algo natural dentro de la programación es poderosísima para programar nuestros objetos.
5-Exploren, construyan y rompan todo si es necesario para aprender. Etoys está para eso.
6-Etoys es transversal a la currícula. No tienen por qué casarse con matemática, física o tecnología. Existen proyectos de música, pintura, literatura y animación.
7-No es lo mismo consultar un valor que asignarlo. Por lo tanto, hay que considerar desde dónde arrastramos a los bloques.
8-Realizar tutoriales, compartir proyectos y sugerir mejoras hace que la experiencia de Etoys sea mejor no sólo en tu escuela sino en todo el mundo. Nada más lindo que enseñarle a un chico a hacer proyectos para que otros chicos puedan aprender una idea.
9-Utilizar bien Etoys requiere constancia pero por sobre todo humildad. Nosotros guiamos a los chicos pero ellos pueden mostrarnos muchas cosas que descubrieron en sus casas. Más se les enseña, más nos enseñan.
10- Diviértanse. Si no es divertido para ustedes ¿Por qué habría de serlo para los chicos?
Bueno, espero que les sirva esto como guía y que les haya gustado.
Les voy a decir una cosa más: Physical Etoys está más vivo que nunca. Y cierro el post con un video emocionante que nos llegó de la provincia de Salta 😀
Que se diviertan!
Creando a Mendieta
Hola a todos!
Como continuación de la presentación de «Mendieta» (ver aquí), en este post les contaré un poco como se creó y listaré sus componentes por si desean fabricarse una.
Como primera medida construimos una versión acotada de la placa, sin la posibilidad de manerar motores de corriente continua, aunque sí servos. Aunque utilizamos el PIC 18F4550 pensando en la versión definitiva, también podríamos haber recurrido al PIC 18F2550, que posee las mismas características, con la diferencia de tener menos cantidad de pines de entrada/salida, pero de ser mas barato y ocupar menos lugar.
Luego de realizado y probado el prototipo, en una placa preperforada y uniendo los componentes con cables «a mano», nos centramos en diseñar el circuito, que quedó de la siguiente manera:

Una vez transferido el diseño a la placa de cobre, se hicieron los agujeros correspondientes con mecha de 1mm, y se soldaron estos componentes:
· PIC 18F4550;
· L293D;
· 40-pin socket;
· 16-pin socket;
· 470uF electrolytic capacitor;
· 4.7 uF electrolytic capacitor;
· 22pF ceramic capacitors (2);
· .1 uF ceramic capacitor;
· USB connector type B;
· resistors 1 kilohm (2), 330 ohms (1);
· crystal 20 MHz
· red LED;
· reset button;
· terminal block;
· pin strips;
· Molex 3 pin connector (9)
El resultado, que ya está funcionando perfectamente, quedó así:

Para terminar este post, les cuento que también diseñamos en Sketch Up una cajita contenedora, a fin de resguardar la electrónica y darle una mejor terminación al trabajo; la misma fue impresa con una impresora 3D. Les dejo una captura de pantalla del diseño 3D:

Esperamos sus comentarios y consultas…
Saludos,
Gabriel
«Mendieta»: proyecto de hardware libre para robótica educativa
Hola a todos!!
Este es mi primer post en el Blog de GIRA; trataré de ir compartiendo mi trabajo con Uds.
Desde que me uní al grupo, estuve trabajando en un proyecto de hardware de bajo costo para robótica, que fuera de fácil construcción y programación, y mas barato que las placas comerciales, como Arduino o Duinobot. Por otra parte, deseábamos que tuviera mayores prestaciones nativas que por ejemplo la placa Pingüino, es por ello que se incorporó un hub de motores, utilizando el integrado L293D, lo que permite manejar 2 motores de CC o un motor PAP en forma bidireccional, y varios servos.
En el proceso de investigación de mercado, tuvimos en cuenta que Mendieta iba a ser conectada al puerto USB, por lo que el microcontrolador debía permitir fácilmente este tipo de conexión. Entre varias opciones, se destacaban los PIC 18F2550 y 18F4550, ambos con interface USB 2.0 nativa y similares características. Nos decidimos a utilizar el 18F4550 por poseer mas puertos digitales y analógicos que el anterior.
El circuito básico de Mendieta se diseñó con Livewire y se le dio la forma definitiva con PCB Wizard. Actualmente estamos con los últimos detalles del hardware y diseñando la «cajita» contenedora, como así el firmware, pero les voy adelantando la forma del circuito y 1º prototipo de Mendieta (en ese momento la parte de motores estaba separada para facilitar las pruebas):

Próximamente postearé mas detalles de la construcción y, como será open hardware también estarán a su disposición los archivos para imprimir el circuito, el listado de componentes y el firmware para descargar… Ah, y obviamente Mendieta será un nuevo modulo en Physical Etoys…
Saludos,
Gabriel
Great news!
Por Sebas - Mendieta, Physical Etoys, Varios - 4/Nov/2013
I have to tell you some important news:
We’re developing a new open-hardware platform that will be the official hardware for Physical Etoys. We plan to use it in combination with the netbooks that our goverment is delivering to children. So our vision may be: One Robot Per Child 😉
Furthermore, we gave four workshops at Universidad Tecnológica Nacional de Rosario:
Introduction to Etoys, Physical Etoys, Extending Etoys and Advanced Programming with Etoys.
The event was called Squeakfest Argentina 2013 and we have the pleasure to translate Cathleen Galas and Kathleen Harness’ talks to Spanish which provided us important approaches to education. Thank you! 😀
I have to tell you one beautiful thing. Perhaps, it is one of the most soul-rewarding experiences that we’ve ever had. Physical Etoys was used a lot in La Rioja, Argentina in order to introduce children into Robotics. Here you can see some quotes about the video”
“Kids are motivated. They want to build something now”
“I really like programming and building with Physical Etoys because it is fun”
“I am thinking about being an engineer”
“We’ve made a race with the cars that we had made and programmed”
“With a few things, you can build a lot. With everything that I can learn here, I can do things at home. If something breaks, for example, the remote controller, I can fix it or see the parts that it has”
Finally, I wanted to tell you that we presented a paper about learning programming by developing games with etoys. This was shown at JAIIO 2013, Córdoba Argentina. One of the games that we’ve developed is called Joplin, which is based on Johann Sebastian Joust and was shown at the EVA 2013, a game developers conference from Argentina.
Well, I think that’s all. Have fun!
Sebastian
Les tengo que contar algunas noticias importantes.
Estamos desarrollando una plataforma de hardware libre que va a ser el hardware oficial de Physical Etoys. Planeamos usarlo en combinación con las netbooks que está entregando nuestro gobierno a los chicos. Nuestra visión podría ser: Un Robot Por Chico.
Además, dimos 4 talleres en la Universidad Tecnológica Nacional de Rosario:
Introducción a Etoys, Physical Etoys, Extendiendo Etoys y Programación Avanzada con Etoys.
El evento se llamó Squeakfest Argentina 2013 y tuvimos el placer de traducir al español las charlas de Cathleen Galas y Kathleen Harness. Las mismas nos brindaron importantes perspectivas sobre la educación. Gracias! 😀
Tengo que contarles algo hermoso. Quizás sea una de las experiencias más reconfortantes que tuvimos. Physical Etoys fue ultilizado un montón en La Rioja para introducir a los niños en robótica. A continuación pueden ver algunas citas del video:
«Los niños están motivados. Ellos quieren construir algo ya»
«Realmente me encanta programar y construir robots con Physical Etoys porque es divertido»
«Estoy pensando en ser ingeniero»
«Hicimos una carrera con los autos que hicimos y programamos»
«Con pocas cosas, uno puede construir un montón. Con todo lo que puedo aprender acá, puedo hacer cosas en casa. Si algo se rompe, por ejemplo, el control remoto, lo puedo arreglar o ver las partes que tiene.»
Finalmente quería contarles que presentamos un trabajo de desarrollo de videojuegos con Etoys para aprender programación. El trabajo fue mostrado en las JAIIO 2013, en Córdoba. Uno de los juegos que hicimos fue Joplin, cuya mecánica de juego se basa en el juego Johann Sebastian Joust y lo mostramos en el espacio independiente de la EVA 2013.
Bueno, creo que es todo. Que se diviertan!
Sebas
-
Estás navegando por los archivos de la categoría Mendieta.

